![]() 当前位置:
关于工控帮 >
新闻资讯 >
技术学习 >
ABB机器人如何设定工具坐标系?
当前位置:
关于工控帮 >
新闻资讯 >
技术学习 >
ABB机器人如何设定工具坐标系?
ABB机器人如何设定工具坐标系?
文章出处:gkb01 阅读量:1734 发表时间:2022-04-11 13:34
1、 机器人默认坐标系
系统自带的TCP坐标原点在第六轴的法栏盘中心,垂直方向为Z轴,符合右手法则。注意:在设置TCP座标的时候一定要把机器人的操作模式调到“手动限速模式。
2、 设定工具坐标系的作用
当机器人夹具被更换,重新定义TCP后,可以不更改程序,直接运行。当安装新夹具后就必需重新定义坐标系。否则会影响机器人的稳定运行。
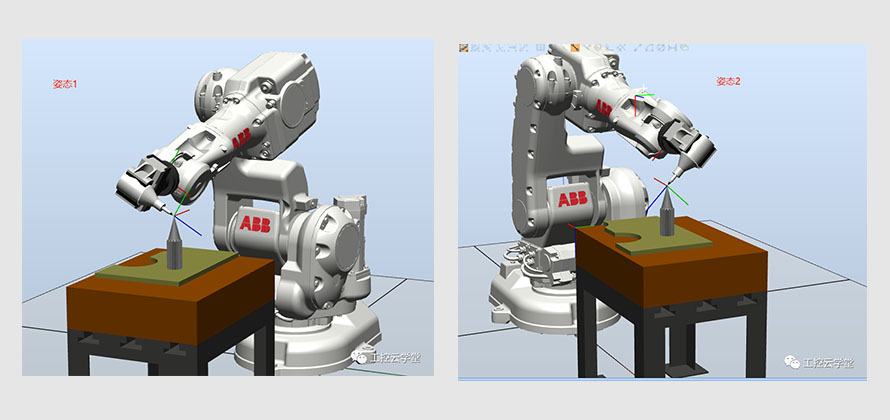
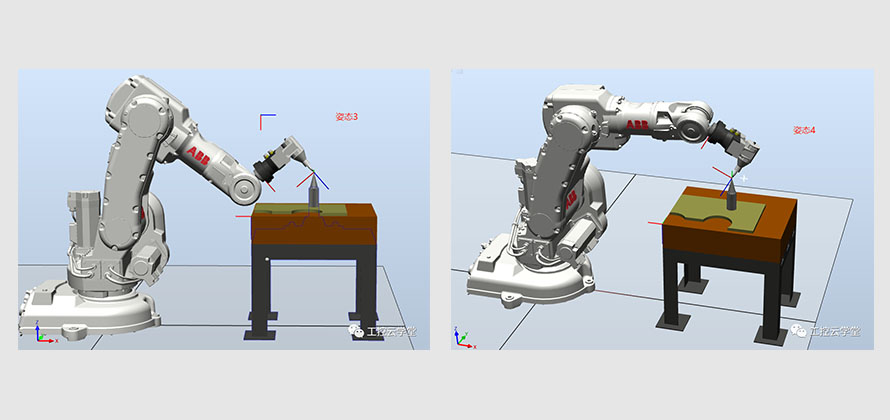
3、工具坐标系定义原理
(1)在机器人工作空间内找一个精确尖锐的的固定点作为参考点。
(2)确定工具上的参考点。
(3)手动操纵机器人,至少用4种不同的工具姿态,使机器人工具上的参考点尽可能与固定点刚好接触。
(4)通过4个位置点的位置数据,机器人可以自动计算出TCP的位置,并将TCP 的位姿数据保存在tooldata 程序数据中被程序调用。
4、 设定工具坐标系的方法
ABB机器人设定工具坐标系的方法有三种:“TCP(默认方向)”、“TCP和 Z”、“TCP和 X ,Z ”。
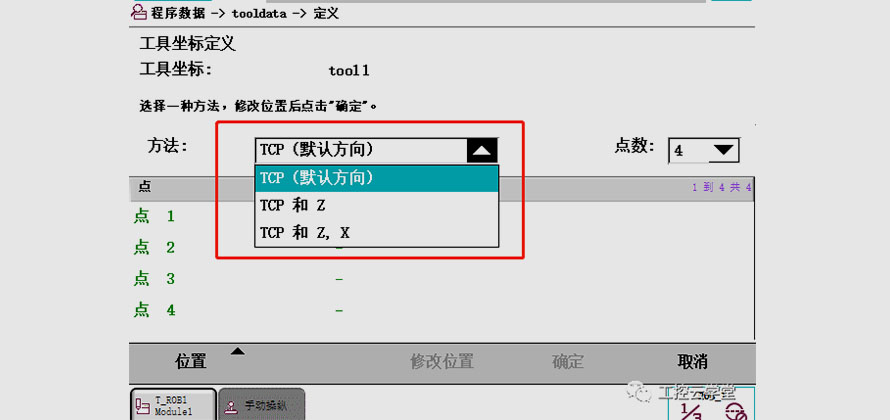
TCP(默认方向) 在定义工新工具坐标系的原点TCP时,由于新工具坐标系的方向仍然使用tool0默认方向。新建工具的TCP的X、Y、Z数据是相对于默认tool0的偏移量,工具的方向X、Y、Z轴用默认tool0方向,所以q1=1,q2、q3、q4都是零,其余参数不变。
TCP和Z 新工具坐标系的TCP数据相对tool0的偏移量,新工具的Z方向要自己根据需求进行定义,X轴和R轴组成平面与新工具Z轴垂直。(延伸器点Z偏移值建议最少100mm以上)
TCP和X、Z 新建工具坐标系完全由自己定义,即工具的TCP原点和X轴、Z轴正方向自己定义,Y轴是根据X轴和Z轴自动推理出来。因为立体空间是由原点O、X轴、Y轴、Z轴组成,X轴、Y轴、Z轴三根轴相互垂直。(延伸器点Z和X偏移值建议最少100mm以上)
下面说一下定义点1、点2、点3、点4的方法(需要四个不同的姿态点,机器人)
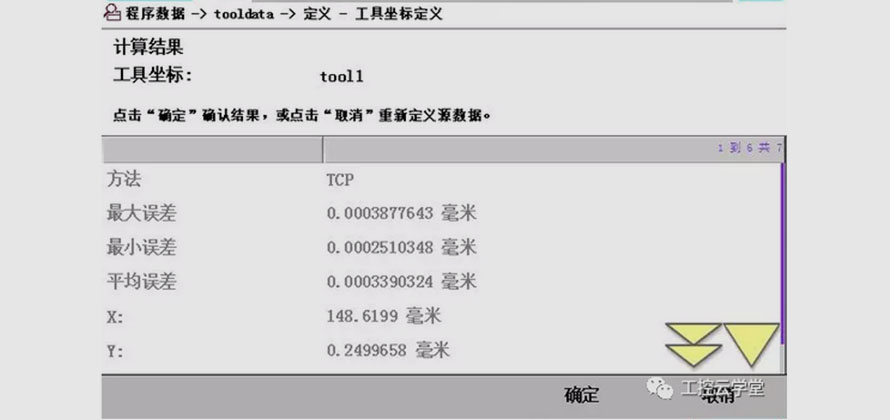
定义完成查看平均误差数据:误差结果越小越好,建议不大于3mm
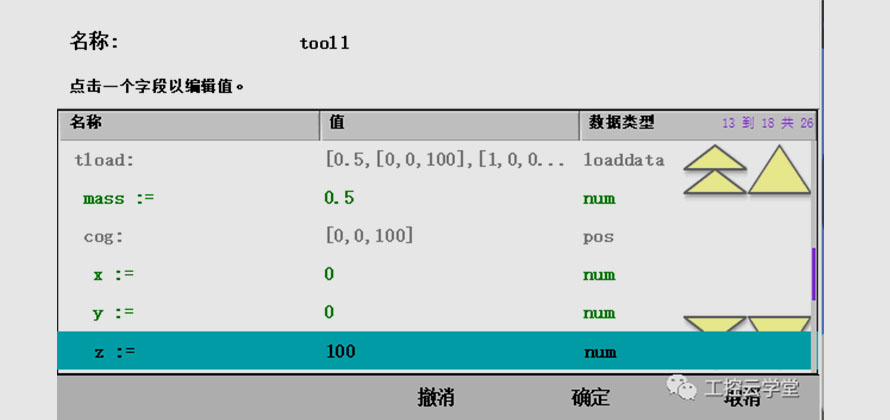
5、 对新建的工具tool1定义其重量、重心的编辑更改值(主菜单、手动操纵、工具坐标、选取tool1、编辑选中更改值)
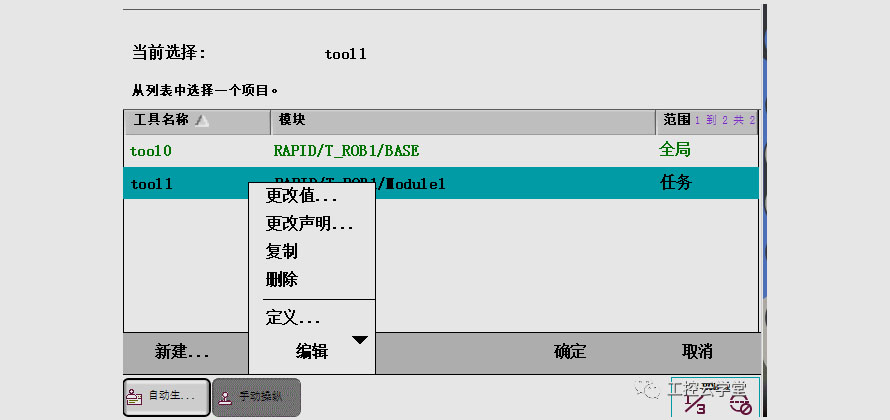
主要更改的数据有2个:mass,质量(根据实际测量数据填写);cog,重心(X、Y、Z数据是相对于默认tool0的偏移量数据)。